Головна » Прес-Центр » Статті та публікації » Високоточне керування положенням валу електродвигуна із використанням перетворювачів частоти Lenze серії i550
24.01.2020
Підвищення продуктивності обладнання в промисловості ставить нові задачі до електроприводів змінного струму з використанням асинхронними двигунами із простими датчиками зворотного зв’язку (інкрементальними енкодерами).
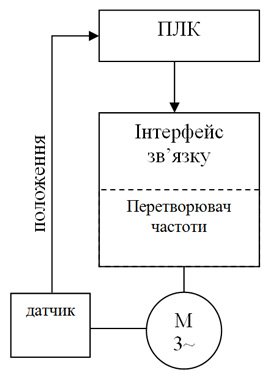
Так, при необхідності керування положенням валу електродвигуна або вихідного валу механізму, енкодер підключається до зовнішнього програмовного логічного контролера (ПЛК), а з цього контролера подається сигнал завдання за швидкістю на перетворювач частоти.
Ця система керування є досить популярною, проте вона має декілька суттєвих недоліків:
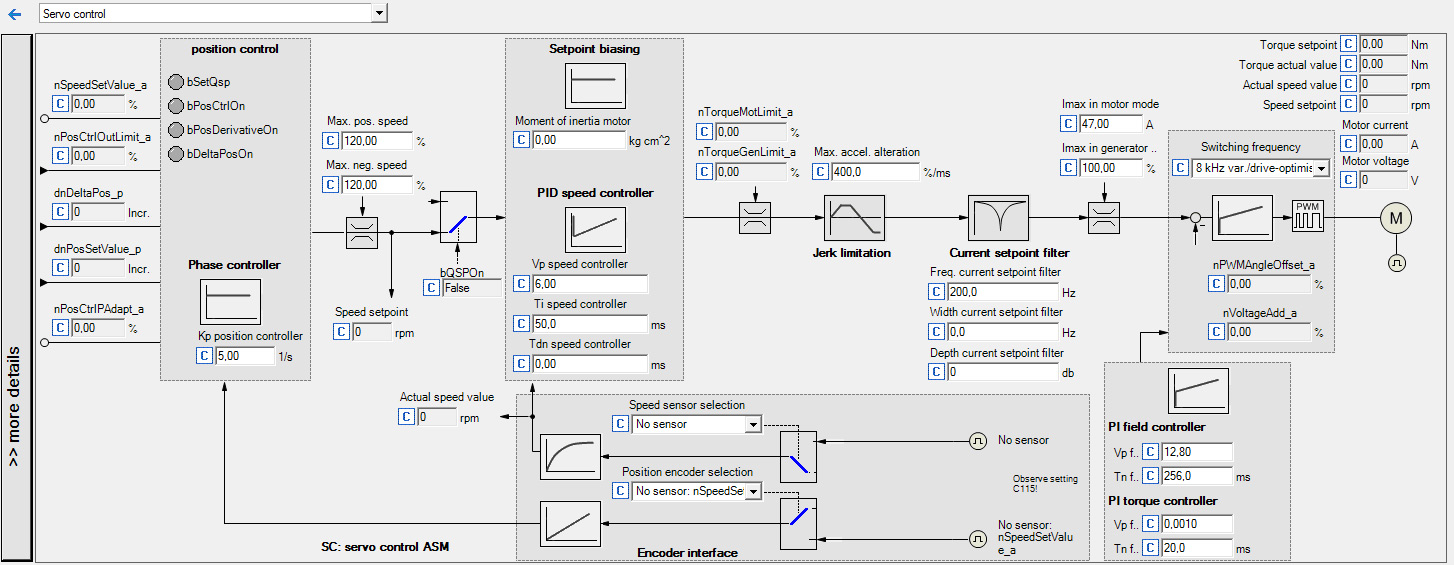
Іншим підходом є використання спеціалізованих перетворювачів частоти, що забезпечують керування положенням асинхронного двигуна із інкрементальним енкодером. Особливістю цих перетворювачів є програмна реалізація трьохконтурної системи підпорядкованого керування координатами електропривода, а саме положенням, швидкістю та моментом двигуна. Наприклад, у перетворювача частоти 8400 Vector Highline від компанії Lenze така система керування наглядно представлена при підключенні до ПК у програмному забезпеченні L-force Engineer за допомогою адаптера інтерфейсів.
Наявність внутрішнього контуру керування швидкістю дозволяє:
Крім того, в перетворювачі частоти 8400 Vector Highline програмно реалізовані профілі переміщення з обмеженням швидкості та прискорення, що відпрацьовуються двигуном при подачі дискретних сигналів. Це дозволяє суттєво розвантажити ПЛК, що формує сигнали зміни положення для перетворювача, або замінити його навіть програмовним логічним реле, типу LRD від компанії Lovato Electric.
Відносним недоліком такого спеціалізованого перетворювача є вартість та складність налаштування. Також, у більшості випадків виникає необхідність реалізації цифрової передачі даних із ПЛК в перетворювач частоти та навпаки при необхідності корекції сигналу положення.
Компромісним, та в більшості випадків, оптимальним рішенням для реалізації системи керування положенням на базі асинхронного двигуна з енкодером є розподілення контурів регулювання по різних програмовних пристроях. Так, контур регулювання швидкості, що забезпечує високий діапазон керування частотою обертання, реалізується на базі відповідного перетворювача частоти із вбудованими високочастотними входами. Контур регулювання положення і профілі переміщення з обмеженням максимальної швидкості та прискорення реалізуються програмно на базі ПЛК, як вказано на схемі:
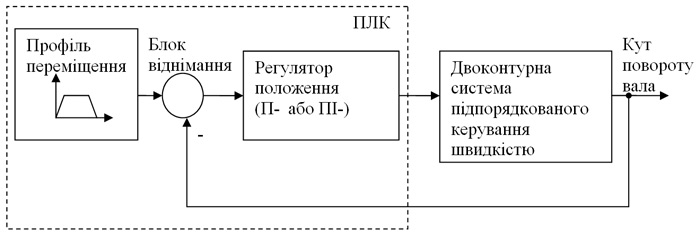
Складність реалізації такої системи полягає у складності передачі сигналу за поточним положенням від енкодера або перетворювача частоти до ПЛК.
Розподілення сигналу від енкодера і на ПЛК, і на перетворювач частоти, призводить до значного ускладнення схеми, ймовірного впливу електромагнітних завад та зменшення довжини кабелю від енкодера в цілому.
З іншого боку, більшість перетворювачів частоти, що навіть вміють обробляти сигнал від енкодера, не вміють обчислювати з нього сигнал за положенням, тим більше передавати його за допомогою інтерфейсу у зовнішні системи керування.
Обидва ці недоліки в повній мірі компенсуються використанням перетворювача частоти серії i550 від компанії Lenze.

Ці перетворювачі розроблені для двигунів загальнопромислових механізмів. Вони складаються із силового блоку необхідної потужності та плати керування з функціоналом, необхідним для вирішення певної технологічної задачі. При цьому силові блоки є змінними і при необхідності можуть бути підключені до плати керування без переносу параметрів.
Існують наступні версії плат керування, відповідно до їх функціоналу:
Усі плати розширення з інтерфейсами містять на борту високочастотні входи для підключення енкодерів із вхідною частотою до 100кГц. Сигнал за положенням з цих входів формується в параметрі перетворювача Р700:003 і може передаватись у зовнішню систему керування за допомогою використовуваного інтерфейсу. Також, за допомогою цього ж інтерфейсу в перетворювач передається сигнал завдання за швидкістю. Отже, фактично, регулятор положення буде відпрацьовувати завдання з тактом квантування близько 1мс, що повністю визначається інерційністю обробки сигналу загальнопромисловим контролером.
Приємним бонусом для реалізації керування переміщенням є можливість зовнішнього обнуління поточного положення як дискретним сигналом, так і за допомогою промислового інтерфейсу. Схема налаштування обнуління сигналу від частотних входів підключення енкодера DI3/DI4 має вигляд:
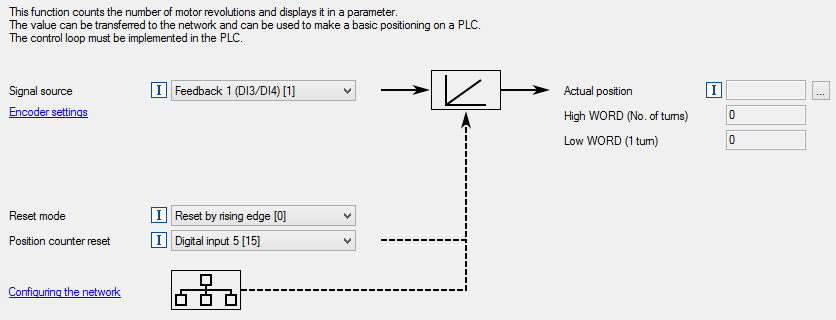
На даній схемі представлена реалізація обнуління положення за переднім фронтом сигналу на вході DI5. Такий функціонал перетворювача дозволяє дуже просто здійснити процедуру Homing (пошуку нульового положення обладнання) при керуванні лише дискретними сигналами від ПЛК.

Вищевказана схема з перетворювачем частоти серії i550 використовується у механізмах з невеликою кількістю фіксованих переміщень, таких як палетні ліфти. Такі ліфти мають два фіксованих положення, в які привод повинен приходити з високою точністю, але невеликою швидкістю. При вмиканні живлення палетного ліфта здійснюється позиціонування в нульову точку (процедура Homing) за фотодатчиком, який розташований в нижній частині установки.
Регулятор положення та два профілі переміщення реалізовані у програмовному логічному контролері Yaskawa Micro CPUM13C, який за допомогою інтерфейсу PROFINET обмінюється даними з платою керування I5CA5R02000VA0000S, встановленою на перетворювачі частоти i550.
Виходячи із наведеного вище слід відмітити, що:
Доцент кафедри АУЕК НТУУ «КПІ ім.І.Сікорського», к.т.н. Торопов А.В.