Головна » Прес-Центр » Статті та публікації » Інтерфейс перетворювачів частоти та його взаємодія з автоматикою насосних установок
26.04.2013
Використання перетворювачів частоти для регулювання продуктивності та енергоефективності насосних установок наразі набуло широкого поширення. Забезпечення якісним водопостачанням промислових підприємств, адміністративних та житлових будівель реалізується пристроями автоматизації різного рівня. При цьому перетворювачі частоти, які використовуються в системах водопостачання, повинні мати інтерфейси взаємозв'язку з автоматикою, що керує, реалізовані з використанням дискретних, аналогових і цифрових каналів передачі даних.
Найпростішим інтерфейсом, яким можна реалізувати керування перетворювачем частоти насосної установки, є дискретні входи/виходи.
Дискретні входи у перетворювачів частоти призначені для подачі команд пуску та зупинки двигуна, зміни режимів роботи перетворювача, перемикання на роботу з фіксованими швидкостями обертання, плавного регулювання швидкості насоса.
До дискретних виходів перетворювача частоти відносяться релейні та транзисторні виходи, призначені для видачі логічних сигналів про несправність перетворювача, досягнення заданої частоти, досягнення межі по струму, подачі команди для включення додаткових нерегульованих насосів.
Більшість найпростіших завдань керування насосами цілком можуть бути вирішені із застосуванням лише дискретних сигналів керування. Так, наприклад, система підтримки рівня із застосуванням поплавкових датчиків верхнього, нижнього та аварійного рівнів, а також елементів сигналізації про перелив або сухий хід насоса вирішується за допомогою найпростішого перетворювача частоти Lenze серії ESMD.
Схематичний вид установки для підкачування води в бак представлений на малюнку:
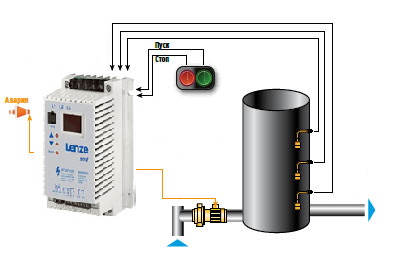
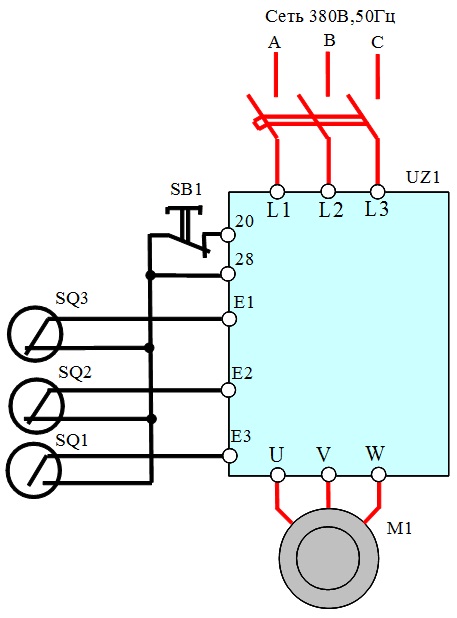
Схема підключення поплавкових датчиків SQ1..SQ3 до перетворювача має вигляд:
Тут:
Кнопки «ПУСК», «СТОП», пристрій сигналізації про аварію та силовий контактор на схемі не вказані.
Зверніть увагу, що поплавкові датчики SQ2, SQ3 необхідно встановити таким чином, щоб по досягненню рівня води контакт датчика розмикався!
Розмикання ланцюга датчика SQ3 розцінюється перетворювачем як аварія, і він зупиняє двигун у режимі вільного вибігу.
Особливістю роботи з дискретними входами частотного перетворювача є те, що входи можуть бути конфігуровані для виконання різних функцій за допомогою зміни значень відповідних параметрів. У разі використання перетворювача частоти Lenze серії ESMD параметри, що визначають функції дискретних входів, представлені в таблиці:
| Код | Параметр | Конфігурація | |
| Заводська | Можливі варіанти | ||
| CE1 | Функция дискретного входа Е1 | 1 | 1 – фіксована швидкість 1
2 – фіксована швидкість 2 3 – динамічне гальмування 4 – напрямок обертання 5 – швидка зупинка 6 – обертання за годинниковою стрілкою 7 – обертання проти годинникової стрілки 8 – UP (збільшення значення уставки) 9 – DОWN (зменшення значення уставки) 10 – встановлення сигналу «Аварія» 11 — скидання сигналу "Аварія" 12 – Прискорення/уповільнення 2 13 – Деактивація ПІ-регулятора 14 – фіксована швидкість 1 c ПІ-регулятором 15 – фіксована швидкість 2 c ПІ-регулятором |
| CE2 | Функція дискретного входу Е2 | 4 | |
| CE3 | Функція дискретного входу Е3 | 3 | |
Для реалізації керування насосом необхідно провести програмне конфігурування перетворювача під конкретне завдання. Для запропонованої схеми конфігурація параметрів СЕ1..СЕ3 має бути такою:
| № параметра | Значение | Призначення | Примітка |
| СЕ1 | 10 | Встановлення сигналу "Аварія" | При спрацюванні датчика SQ3 перетворювач зупиняється із зовнішньої помилки |
| СЕ2 | 8 | Збільшення значення уставки | Збільшується значення уставки «електронного потенціометра» |
| СЕ3 | 9 | Зменшення значення уставки | Збільшується значення уставки «електронного потенціометра» |
«Електронний потенціометр» — функція плавної зміни уставки завдання швидкості обертання за допомогою дискретних входів. Його логіка при керуванні насосом для цієї схеми полягає в наступному:
Так само конфігуруються і дискретні виходи перетворювача частоти.
Зверніть увагу, що неспрацьовування реле може бути викликане в першу чергу неправильним конфігуруванням перетворювача!
У перетворювачі частоти Lenze серії ESMD функція релейного виходу визначається параметром С08 згідно таблиці:
| Код | Параметр | Конфігурація | |
| Заводская | Можливі варіанти | ||
| C08 | Конфігурація релейного виходу | 1 | 0 – готовність перетворювача
1 – несправність 2 – двигун обертається 3 – двигун обертається за ч.с. 4 – двигун обертається проти ч.с. 5 — вихідна частота = 0 Гц 6 – вийшов на задану частоту 7 – перевищення порога fmin 8 – досягнення струмової межі 9 – Сигнал зворотного зв'язку знаходиться в межах min/max 10 – Сигнал зворотного зв'язку знаходиться в межах min/max |
Ще слід зазначити, що у перетворювачах частоти найчастіше контакти релейного виходу немає потенціалу, тобто є сигналом типу «сухий контакт». Для комутації навантаження або елементів сигналізації необхідно використовувати зовнішнє джерело живлення.
Схема включення світлової сигналізації під час переливу для попереднього прикладу має вигляд:
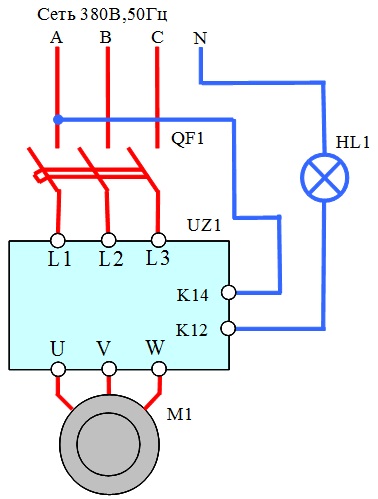
HL1 – пристрій світлової сигналізації.
При переході перетворювача частоти в стан «Аварія» реле замикається і вмикається лампа аварійної сигналізації. Вимкнення сигналізації можливе за:
Для конфігурування реле перетворювача частоти на видачу сигналу несправності необхідно встановити значення параметра «С08» рівним одиниці.
Отже, з використанням дискретних сигналів дозволяє реалізувати:
Для плавного регулювання швидкості в системі із зовнішнім регулятором технологічного процесу, видачі сигналів про поточну швидкість та завантаження перетворювача необхідно використовувати ще й аналогові сигнали.
Для складніших завдань керування насосами, взаємопов'язаної їх роботи, точної підтримки технологічного параметра (тиску, витрати, рівня) необхідно використовувати аналогові сигнали за струмом та напругою. Типовими аналоговими сигналами, що використовуються в перетворювачах частоти насосних установок, є сигнали за напругою 1..5В, 0..10В та струму 4..20мА.
Вони надходять на перетворювач частоти з датчиків тиску, витрати, зовнішніх технологічних контролерів. Тут слід зазначити, що передачі сигналів від датчиків тиску і витрати переважно використовується струмовий сигнал 4..20мА. Цей сигнал менш чутливий до перешкод, що дозволяє розташувати датчик технологічного параметра віддалено від шафи керування із перетворювачем частоти. У той же час контролер найчастіше розташований поруч із перетворювачем частоти, що дозволяє використовувати сигнали по напрузі без перешкод.
У ряді випадків для простого керування продуктивністю насоса використовується потенціометр, конструктивно розташований на лицьовій панелі блоку керування.
Цікавою особливістю застосування потенціометра для завдання швидкості обертання є те, що кінцевий споживач часто стикається з проблемою вибору номінального опору. Справа в тому, що для більшості перетворювачів частоти значення потенціометра, що підключається, знаходиться в досить широких межах і становить 1..10кОм. При величині опорної напруги 5В значення струму, що протікає через потенціометр, лежить у межах 0,5...5мА.
У цьому випадку вибір рекомендованого опору визначиться віддаленістю потенціометра від перетворювача частоти. Справа в тому, що при використанні потенціометра з великим опором по сигнальному проводу протікатиме менший струм, іноді порівнянний з перешкодами струмами. Таке підключення можливе при встановленні потенціометра в тому ж блоці керування, що перетворювачем частоти. В інших випадках рекомендується підключення потенціометра з меншим опором. Слід пам'ятати, що сигнальні дроти від потенціометра повинні прокладатися окремо від силових дротів електроживлення, щоб уникнути впливу електромагнітних перешкод.
Використання потенціометра як джерела завдання швидкості обертання насоса є вкрай рідкісним. Найчастіше за його допомогою задається уставка за тиском, а стабілізація тиску реалізується внутрішнім програмним ПІД – регулятором перетворювача частоти. Підключення датчика тиску здійснюється на інший аналоговий вхід перетворювача частоти.
Тут набирає чинності одне з обмежень застосування багатьох перетворювачів частоти для насосних систем – за необхідності регулювання уставки тиску від потенціометра необхідно використовувати перетворювач частоти з двома аналоговими входами.
При цьому схема підключень аналогових керуючих сигналів на прикладі перетворювача частоти Lenze серії ESV має вигляд:
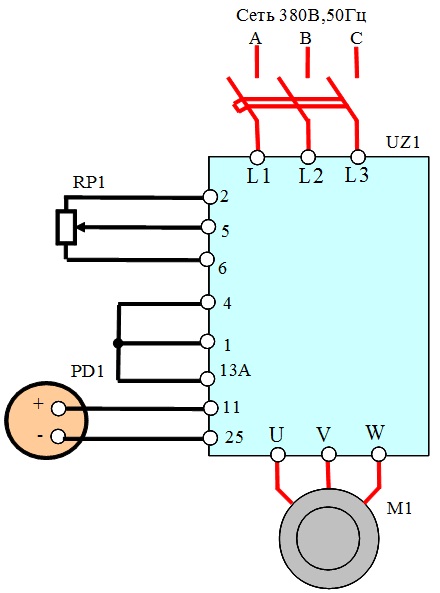
Тут PR1 — потенціометр, що задає опором 1..10кОм; PD1 – датчик відносного тиску Kobold із аналоговим вихідним сигналом 4..20мА. Перемичка між клемами 1 та 4 визначає дозвіл роботи перетворювача, перемичка між клемами 1 та 13А – включення програмного ПІД – регулятора тиску.
Для реалізації керування насосом необхідно провести програмне конфігурування перетворювача під конкретне завдання. Для запропонованої схеми конфігурація параметрів має бути такою:
| № параметра | Опис | Значення | Примітка |
| Р100 | Джерело команди пуску | 1 | Керування з клемної колодки |
| Р101 | Стандартне джерело задає уставки | 1 | 0-10 У постійного струму (при запропонованому підключенні сигнал з потенціометра) |
| Р102 | Мінімальна частота обертання | 20.0 | Адаптувати до процесу з урахуванням обмежень* |
| Р103 | Максимальна частота обертання | 50.0 | |
| Р104 | Час розгону | 5.0 | Адаптувати до процесу |
| Р105 | Час гальмування | 5.0 | |
| Р110 | Спосіб пуску | 1 | Пуск при подачі живлення |
| Р121 | Функція входу ТВ-13А | ||
| Р200 | Режим ПІД — регулювання | 1 | Включено за логікою «нагрівача» |
| Р201 | Джерело зворотного зв'язку ПІД — регулятора | 0 | Датчик тиску підключений до входу 4..20 мА |
| Р207 | Пропорційна складова ПІД – регулятора | 5.0 | Адаптувати до процесу |
| Р208 | Інтегральна складова ПІД – регулятора | 0.0 | |
| Р209 | Диференційна складова ПІД – регулятора | 0.0 |
*) – при встановленні малої частоти обертання, насос не створює тиску, лише споживає електроенергію;
— при встановленні частоти обертання насоса вище за номінальний двигун буде перегріватися.
Інші параметри відповідають заводським налаштуванням і можуть бути скориговані фахівцем для оптимальної роботи з конкретним двигуном та механізмом.
Зрозуміло, представлена схема не містить великої кількості елементів, що додатково використовуються для керування насосами. Так, пристрій керування насосом додатково містить контактори для прямого пуску насоса у разі несправності перетворювача, перемикач режимів роботи «автоматичний/ручний», індикатори наявності електроживлення та працездатності перетворювача.
Аналогові виходи перетворювача можуть бути використані для пропорційного керування виконавчими механізмами, додатковим обладнанням, іншими перетворювачами частоти. Одним із варіантів такого підходу є керування кількома перетворювачами частоти насосів, що працюють на одну гідравлічну мережу. При цьому високі вимоги до точності передачі сигналу за швидкістю відсутні, тобто використання аналогового сигналу буде цілком виправданим.
Схема підключення провідного та веденого перетворювачів частоти має вигляд:
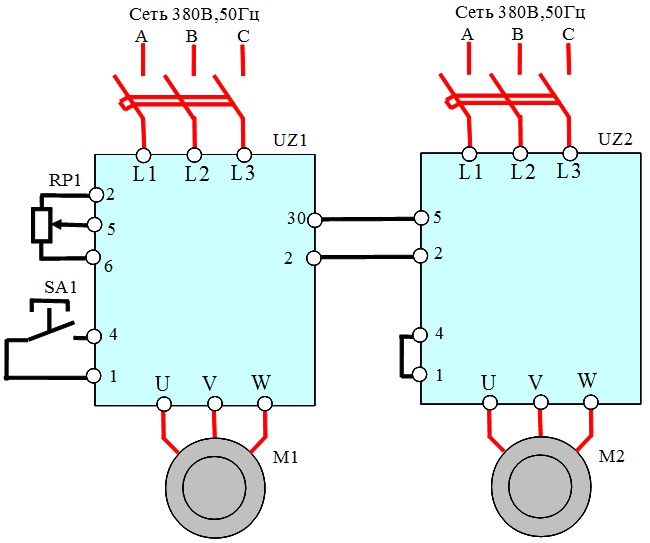
Тут UZ1 – перетворювач частоти провідного насоса, UZ2 – перетворювач частоти провідного насоса.
Також аналогові виходи перетворювача можуть використовуватися для індикації параметрів роботи електродвигуна, зокрема його швидкості, навантаження, споживаної потужності. Часто перетворювач частоти встановлюється всередину електромонтажного ящика для захисту перетворювача від пилу та вологи, дотримання умов електробезпеки, захисту від механічних пошкоджень. При цьому панель індикації самого перетворювача виявляється закритою від користувача і виникає необхідність використання пульта керування або панелі оператора, що встановлюється на лицьову панель електромонтажної скриньки.

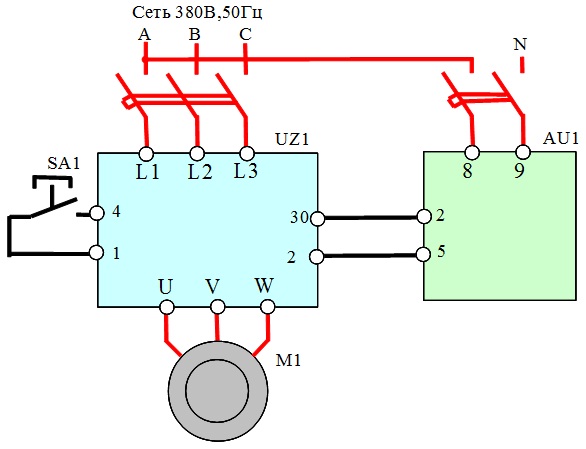
У той самий час більшість застосувань досить індикації лише з робочих параметрів, наприклад швидкості обертання чи навантаження. У цьому випадку може використовуватися аналоговий вихід перетворювача, якого підключається вимірювальний прилад з відповідним входом. Перевагою такого підходу є можливість масштабування сигналу перетворювача одиницях користувача на цифровому вимірювальному приладі. Приміром, сигнал по навантаженню чи швидкості перетворювача то, можливо переведений у кілограми, метри, бари чи інші одиниці виміру, що відображаються на дисплеї.
Приклад підключення аналогового виходу перетворювача до вимірювального пристрою з аналоговим входом 0..10В від компанії Autonics MT4W-DV-4x представлений на схемі:
Використовується для керування перетворювачем частоти від зовнішнього програмованого логічного контролера. У системах автоматики насосних установок практично не використовується, оскільки є тільки у високоточних і дорогих перетворювачах, що рекомендуються для використання в інших приводних задачах. В окремих випадках, коли контролюється витрата води, до частотного входу перетворювача частоти підключається імпульсний вихід датчика витрати.

Якщо необхідно реалізувати керування від зовнішнього контролера кількома перетворювачами частоти, розташованих на віддаленні один від одного, то оптимальним рішенням є передача сигналів, що керують, по послідовному інтерфейсу. За цим інтерфейсом можлива передача даних про поточний стан перетворювача, параметри його роботи.
При цьому, якщо вибраний інтерфейс підтримує шинну топологію, то значно скорочується кількість проводів для передачі даних.
Основні послідовні інтерфейси та протоколи, реалізовані в перетворювачах частоти:
| Интерфейс | Протокол |
| RS485 | Modbus RTU |
| Profibus DP | |
| CANbus | CANopen |
| DeviceNet |
Для керування перетворювачами частоти насосних установок в основному використовується Modbus RTU з передачею даних за інтерфейсом RS485 внаслідок своєї простоти, доступності та простоти реалізації.
Modbus RTU – це протокол, у якому реалізовано один «майстер», тобто один пристрій опитує інші прилади. У системах насосної автоматики таким пристроєм є зовнішній програмований логічний контролер.
При керування Modbus RTU на перетворювач передаються «командне слово» і «завдання швидкості», а з перетворювача читаються «слово стану» і «поточна швидкість». У командному слові встановленням відповідних бітів реалізується повне керування логікою роботи перетворювача.
Особливістю Modbus RTU є те, що регістри пам'яті, які необхідно передавати «командне слово» і «завдання швидкості» мають різні адреси для різних серій перетворювачів частоти. Тому, до суттєвих недоліків керування за послідовним інтерфейсом, є неможливість заміни перетворювача, що відмовив, новим, аналогічним за технічними характеристиками, що також містять Modbus RTU, але іншого виробника або іншої серії.
Ще однією особливістю керування за послідовним інтерфейсом є складність реалізації місцевого керування. Справа в тому, що частіше контролер, який керує автоматикою насосних установок, розташований далеко від перетворювача частоти. При аварійному відключенні одного перетворювача частоти контролер індикує тайм-аут передачі даних і може уникнути помилки, індикуючи про обрив послідовного інтерфейсу.Тому використовуються два основних підходи при реалізації перемикання між дистанційним керуванням за послідовним інтерфейсом та місцевим від потенціометра:
Схема підключення перетворювача частоти при першому підході не має суттєвих особливостей, оскільки перемикання сигналів, що керують, реалізується програмно.
Другий підхід докладно розглянемо на прикладі роботи з перетворювачем частоти Lenze серії ESV.
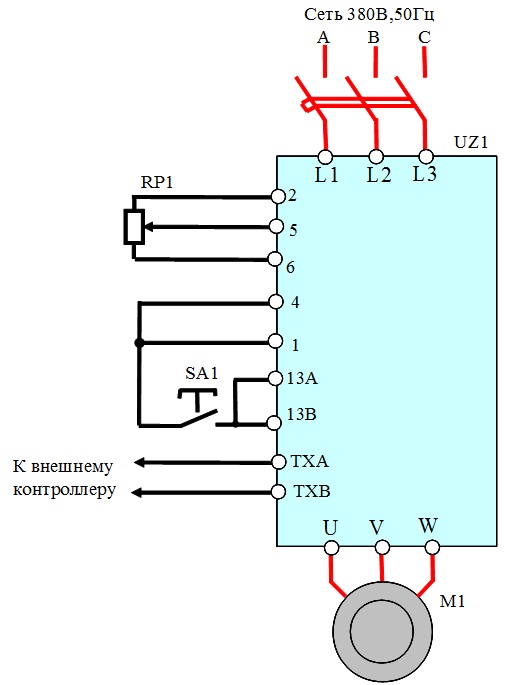
SA1 – перемикач режимів роботи «Автоматичний/ручний».
Для запропонованої схеми конфігурація параметрів має бути такою:
| № параметра | Опис | Значення | Примітка |
| Р100 | Джерело команди пуску | 1 | Керування з клемної колодки |
| Р101 | Джерело сигналу завдання швидкості | 1 | 0-10 В постійного струму (при запропонованому підключенні сигнал із потенціометра) |
| Р102 | Мінімальна частота обертання | 20.0 | Адаптувати до процесу з урахуванням обмежень* |
| Р103 | Максимальна частота обертання | 50.0 | |
| Р104 | Час розгону | 5.0 | Адаптувати до процесу |
| Р105 | Час гальмування | 5.0 | |
| Р110 | Спосіб запуску | 1 | Пуск при подаче питания |
| Р121 | Функція входу ТВ-13А | 7 | Керування швидкістю двигуна по мережі |
| Р122 | Функція входу ТВ-13B | 1 | Керування швидкістю двигуна по мережі |
При розмиканні оператором SA1 керування перетворювачем по мережі повністю відключається, і привід переходить у режим керування від потенціометра. При цьому перетворювач у регістр «слова стану» встановлює біт, що сигналізує про те, що керування мережею відключено. Зовнішній контролер повинен зреагувати відповідним чином, тобто припинити передачу команд, що керують, на перетворювач частоти і тільки стежити за поточним «словом стані».
З попередніх схем випливає, що керування перетворювачем може бути успішно реалізовано з використанням комбінації дискретних, аналогових та цифрових сигналів. При цьому досягається повна керованість процесом за рахунок простого перемикання режимів роботи перетворювача, можливості точного та плавного регулювання швидкості від зовнішнього пристрою, корекції параметрів перетворювача в процесі роботи.
Розробнику систем автоматизації насосних установок доводиться вибирати, яким чином здійснюватиметься керування перетворювачем, як індикуватимуться повідомлення про несправність системи, які функції будуть доступні оператору в режимі ручного керування. Для цього він має визначитися з відповідями на такі запитання.
Питання 1. Чи є зовнішній програмований логічний контролер з інтерфейсом RS485, на якому можна реалізувати керування кількома перетворювачами частоти?
У разі позитивної відповіді очевидною стає перевага використання цифрової передачі як для керування перетворювачем, так і для аналізу його стану. Індикацію стану перетворювача можна на панелі оператора, розташованої поруч із контролером. У блоці керування достатньо встановити індикатор наявності живлення, індикатор працездатності перетворювача та двигуна, а також тумблера для переведення перетворювача в режим ручного керування та запуску для роботи з фіксованою швидкістю.
Питання 2. Чи є у перетворювача більше одного аналогового входу?
Очевидно, що при регулюванні тиску датчик з аналоговим виходом підключається до аналогового входу перетворювача. Якщо у перетворювача немає другого аналогового входу, то керування ним можна реалізувати лише за допомогою дискретних входів або послідовного інтерфейсу.
Питання 3. Чи використовується в системі датчик технологічного параметра з аналоговим виходом?
Часто при керуванні насосами достатньо використовувати датчики рівня та тиску з дискретним виходом. У цьому також відпадає необхідність плавного завдання установки з допомогою послідовного інтерфейсу чи потенциометра. Найчастіше робота перетворювача частоти здійснюється на фіксованих швидкостях, які визначаються при налагодженні системи та зрідка коригуються оператором у процесі експлуатації.
Вищеперелічені питання та відповіді далеко не повною мірою дозволяють визначити необхідність використання дискретних, аналогових або цифрових сигналів керування та контролю, однак можуть суттєво спростити процедуру вибору проектувальником способу керування перетворювачами частоти насосних установок.
{kind=link}