Головна » Рішення » Галузеві рішення » Автоматизація процесів » Крокові двигуни
Крокові двигуни широко використовуються в принтерах, автоматичних інструментах, приводах дисководів, автомобільних приладових панелях та інших додатках, що потребують високої точності позиціонування.
Виробники крокових двигунів: Autonics, Motionking, Fulling motor та інші.
Двигуни постійного струму (ДПС) Lenze починають працювати відразу, як тільки до них буде додана постійна напруга. Перемикання напрямку струму через обмотки ротора здійснюється механічним комутатором — колектором. Постійні магніти розташовані на статорі. Кроковий двигун може бути розглянутий як ДПС без комутатора. Обмотки його є частиною статора. На роторі розташований постійний магніт або, для випадків зі змінним магнітним опором, зубчастий блок із магнітом'якого матеріалу. Усі комутації виконуються зовнішніми схемами. Зазвичай система мотор–контролер розробляється так, щоб була можливість виведення ротора у будь-яку фіксовану позицію, тобто система керується за положенням. Циклічність позиціонування ротора залежить від його геометрії.
Розрізняють крокові двигуни (Autonics, Motionking, Fulling motor) та серводвигуни (Lenze). Принцип їх дії багато в чому схожий, і багато контролерів можуть працювати з обома типами. Основна відмінність полягає у кількості кроків на цикл (один оборот ротора). Серводвигуни вимагають наявності в системі керування аналогового зворотного зв'язку, в якості якого зазвичай використовується потенціометр. Струм у цьому випадку обернено пропорційний різниці бажаного і поточного положень. Крокові двигуни переважно використовуються в системах без зворотного зв'язку, що вимагають невеликих прискорень при русі.
Крокові двигуни (КД) діляться на два різновиди: двигуни з постійними магнітами і двигуни зі змінним магнітним опором (гібридні двигуни). З погляду контролера відмінність між ними відсутня. Двигуни з постійними магнітами зазвичай мають дві незалежні обмотки, у яких може бути або бути відсутнім серединне відвід (див. рис.1).
Рис.1. Уніполярний КД із постійними магнітами.
Біполярні крокові двигуни з постійними магнітами та гібридні двигуни сконструйовані простіше, ніж уніполярні двигуни, обмотки в них не мають центрального відводу (див. рис.2).
Рис.2. Біполярний та гібридний КД.
За це спрощення доводиться платити складнішим реверсуванням полярності кожної пари полюсів двигуна.
Крокові двигуни мають широкий діапазон кутової роздільності. Більш грубі мотори зазвичай обертаються на 90° за крок, тоді як прецизійні двигуни можуть мати роздільну здатність 1,8° або 0,72° на крок. Якщо контролер дозволяє, то можливе використання напівкрокового режиму або режиму з дрібнішим дробленням кроку (мікрокроковий режим), при цьому на обмотки подаються дробові значення напруги, що часто формуються за допомогою ШІМ-модуляції.
Якщо в процесі керування використовується збудження тільки однієї обмотки в будь-який момент часу, то ротор повертатиметься на фіксований кут, який утримуватиметься, поки зовнішній момент не перевищить моменту утримання двигуна в точці рівноваги.
Для правильного керування біполярним кроковим двигуном необхідна електрична схема, яка повинна виконувати функції старту, стопу, реверсу та зміни швидкості. Кроковий двигун транслює послідовність цифрових перемикань у рух. Магнітне поле, що обертається, забезпечується відповідними перемиканнями напруг на обмотках. Слідом за цим полем обертатиметься ротор, з'єднаний за допомогою редуктора з вихідним валом двигуна.
Кожна серія містить високопродуктивні компоненти, що відповідають дедалі більшим вимогам до характеристик сучасних електронних застосувань.
Схема керування для біполярного крокового двигуна вимагає наявності мостової схеми кожної обмотки. Ця схема дозволяє незалежно змінювати полярність напруги на кожній обмотці.
На рис. 3 показана послідовність керування режиму з одиничним кроком.
Рис. 3. Керівна послідовність для режиму з одиничним кроком.
На рис. 4 показано послідовність для напівкрокового керування.
Рис. 4. Керівна послідовність для половинного режиму.
Максимальна швидкість руху визначається виходячи з фізичних можливостей крокового двигуна. У цьому швидкість регулюється шляхом зміни розміру кроку. Більші кроки відповідають більшій швидкості руху.
У системах керування електроприводами для відпрацювання заданого кута або переміщення використовують датчики зворотного зв'язку за кутом або положенням вихідного валу виконавчого двигуна.
Система відпрацювання кута вихідного валу двигуна з використанням датчика зворотного зв'язку
Якщо як виконавчий двигун використовувати синхронний кроковий двигун, то можна обійтися без датчика зворотного зв'язку (Дт) і спростити систему керування двигуном (СК), тому що відпадає необхідність використання в ній цифро-аналогових (ЦАП) і аналого-цифрових (АЦП) перетворювачів.
Кроковими двигунами називаються синхронні двигуни, що перетворюють команду, задану у вигляді імпульсів, у фіксований кут повороту двигуна або у фіксоване положення рухомої частини двигуна без датчиків зворотного зв'язку.
Потужність крокових двигунів лежить в діапазоні від одиниць ват до одного кіловата. Кроковий двигун має не менше двох положень стійкої рівноваги ротора в межах одного обороту. Напруга живлення обмоток керування крокового двигуна являє собою послідовність однополярних або двополярних прямокутних імпульсів, що надходять від електронного комутатора (К). Результуючий кут відповідає числу перемикань комутатора, а частота обертання двигуна відповідає частоті перемикань електронного комутатора. Крокові двигуни розрізняються за конструктивними групами: активного типу (з постійними магнітами), реактивного типу та індукторні. На відміну від синхронних машин безперервного обертання, крокові двигуни мають на статорі явно виражені полюси, на яких розташовані котушки обмоток керування.
Принцип дії крокового двигуна активного типу розглянемо на прикладі двофазного двигуна
Принципова схема керування кроковим двигуном
Розрізняють два види комутації обмотки крокового двигуна: симетрична та несиметрична.
При симетричній системі комутації на всіх чотирьох тактах збуджується однакова кількість обмоток керування
Симетрична схема комутації
При несиметричній системі комутації парним і непарним тактам відповідає різна кількість збуджених обмоток керування
Несиметрична система комутації
Ротор у крокового двигуна активного типу є постійним магнітом, при числі пар полюсів більше 1, виконаний у вигляді "зірочки".
Кількість тактів КТ системи керування називають кількістю станів комутатора на періоді його роботи T. Як видно з малюнків для симетричної системи керування КТ =4, а для несиметричної КТ =8.
У загальному випадку число тактів КТ залежить від числа обмоток керування (фаз статора) mу і може бути пораховано за формулою:
KT=myn 1n< sub>1
де
n1=1 при симетричній системі комутації;
n1=2 при несиметричній системі комутації;
n2=1 при однополярній комутації;
n2=2 при двополярній комутації.
Схеми, що ілюструють положення ротора крокового двигуна з постійними магнітами
при підключенні до джерела живлення однієї (а) та двох обмоток (б)
При однополярній комутації струм в обмотках керування протікає в одному напрямку; при двополярній – в обох. Синхронізуючий (електромагнітний) момент машини є результатом взаємодії потоку ротора з магнітним полем статора, що дискретно обертається. Під дією цього моменту ротор прагне зайняти таке положення у просторі машини, при якому осі потоків ротора та статора збігаються. Ми розглянули крокові синхронні машини із однією парою полюсів (р=1). Реальні крокові мікродвигуни є багатополюсними (1). Для прикладу наведемо двополюсний трифазний кроковий двигун.
Двигун з парами полюсів має зубчастий ротор у вигляді зірочки з рівномірно розташованими вздовж кола 2р постійними магнітами. Для багатополюсної машини величина кутового кроку ротора дорівнює:

Чим менше крок машини, тим точніше (за абсолютною величиною) відпрацьовуватиметься кут. Збільшення числа пар полюсів пов'язане з технологічними можливостями та збільшенням потоку розсіювання. Тому р = 4...6. Зазвичай величина кроку ротора активних крокових двигунів становить десятки градусів.
Принцип дії реактивного редукторного крокового двигуна: (а) — вихідне положення стійкої рівноваги;
(б) — положення стійкої рівноваги, зсунуте на один крок
Якщо зубці ротора співвісні з однією діаметрально розташованою парою полюсів статора, то вони зрушені відносно кожної з трьох пар полюсів статора, що залишилися, відповідно на ј, Ѕ і ѕ зубцевого поділу.
При великій кількості зубців ротора Zр його кут повороту значно менше кута повороту поля статора.
Величина кутового кроку редукторного реактивного крокового двигуна визначиться виразом:

У виразі для КТ величину n2 слід брати рівною 1, тому що зміна напрямку поля не впливає на положення ротора.
Електромагнітний синхронізуючий момент реактивного двигуна зумовлений, як і у випадку звичайного синхронного двигуна, різною величиною магнітних опорів по поздовжній та поперечній осях двигуна.
Основним недоліком крокового реактивного двигуна є відсутність синхронізуючого моменту при знеструмлених обмотках статора.
Підвищення ступеня редукції крокових двигунів, як активного типу, так і реактивного, можна досягти застосуванням двох-, трьох- і багатопакетних конструкцій. Зубці статора кожного пакета зсунуті один на одного на частину зубцевого поділу. Якщо число пакетів два, цей зсув дорівнює 1/2 зубцевого поділу, якщо три, то — 1/3, і т.д. Водночас ротори-зірочки кожного з пакетів не мають просторового зсуву, тобто осі їх полюсів повністю збігаються. Така конструкція складніша у виготовленні і дорожча за однопакетну, і, крім того, вимагає складного комутатора. Індукторні (гібридні) крокові двигуни. Прагнення поєднати переваги активного крокового двигуна (великий питомий момент синхронізації на одиницю об'єму, наявність моменту фіксації) та реактивного крокового двигуна (мала величина кроку) призвело до створення гібридних індукторних крокових двигунів.
В даний час є велика кількість різних конструкцій індукторних двигунів, що розрізняються числом фаз, розміщенням обмоток, способом фіксації ротора при знеструмленому статорі і т.д. У всіх конструкціях індукторних крокових двигунів момент, що обертає, створюється за рахунок взаємодії магнітного поля, створюваного обмотками статора, і постійного магніту в зубчастій структурі повітряного зазору. При цьому момент синхронізації крокового індукторного двигуна за природою є реактивним і створюється намагнічувальною силою обмоток статора, а постійний магніт, розташований або на статорі, або на роторі, створює момент фіксації, що утримує ротор двигуна в заданому положенні за відсутності струму в обмотках статора.
У порівнянні з кроковим двигуном реактивного типу у індукторного крокового двигуна при однаковій величині кроку більший синхронізуючий момент, кращі енергетичні та динамічні характеристики.
При автоматизації виробничих процесів часто-густо необхідно переміщати об'єкти у площині (наприклад, в графопобудовниках сучасних ЕОМ тощо). У цьому випадку доводиться застосовувати перетворювач обертального руху в поступальний за допомогою кінематичного механізму. Лінійні крокові двигуни перетворять імпульсну команду безпосередньо в лінійне переміщення. Це дозволяє спростити кінематичну схему різних електроприводів.
Схема, що ілюструє роботу лінійного крокового двигуна
Статор лінійного крокового двигуна є плитою з магнітом'якого матеріалу. Підмагнічування магнітопроводів проводиться постійним магнітом. Зубцові поділки статора та рухомої частини двигуна рівні. Зубцеві поділки в межах одного магнітопроводу ротора зрушені на половину зубцевого поділу t/2. Зубцеві поділки другого магнітопроводу зсунуті щодо зубцевих поділок першого магнітопроводу на чверть зубцевого поділу t/4. Магнітний опір потоку підмагнічування не залежить від положення рухомої частини.
Принцип дії лінійного крокового двигуна не відрізняється від принципу дії індукторного крокового двигуна. Різниця лише в тому, що при взаємодії потоку обмоток керування зі змінною складовою потоку підмагнічування створюється не момент, а сила FС, яка переміщує рухому частину таким чином, щоб проти зубців даного магнітопроводу знаходилися статори зубці, тобто. на чверть зубцевого поділу t/4.

де
KТ — число тактів схеми керування.
Для переміщення об'єкта в площині за двома координатами застосовуються двокоординатні лінійні крокові двигуни.
У лінійних крокових двигунах застосовують магніто-повітряну підвіску. Ротор притягується до статора силами магнітного тяжіння полюсів ротора. Через спеціальні форсунки під ротор нагнітається стиснене повітря, що створює силу відштовхування ротора від статора. Таким чином, між статором і ротором створюється повітряна подушка і ротор підвішується над статором з мінімальним повітряним зазором. При цьому забезпечується мінімальний опір руху ротора та висока точність позиціонування.
Режими роботи синхронного крокового двигуна. Кроковий двигун працює стійко, якщо в процесі відпрацювання кута при подачі на його обмотки керування серії імпульсів не відбувається втрати жодного кроку. Це означає, що в процесі відпрацювання кожного з кроків ротор двигуна займає стійку рівновагу по відношенню до вектора магнітної індукції результуючої магнітного поля статора.
Режим відпрацювання одиничних кроків відповідає частоті імпульсів керування, що подаються на обмотки крокового двигуна, при якому кроковий двигун відпрацьовує до приходу наступного імпульсу заданий кут обертання. Це означає, що на початку кожного кроку кутова швидкість обертання двигуна дорівнює 0
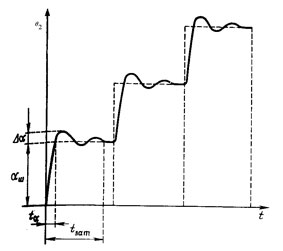
Процес відпрацювання кроків кроковим двигуном
При цьому можливі коливання кутового валу двигуна щодо значення, що встановилося. Ці коливання обумовлені запасом кінетичної енергії, накопиченої валом двигуна при відпрацюванні кута. Кінетична енергія перетворюється на втрати: механічні, магнітні та електричні. Чим більша величина перерахованих втрат, тим швидше закінчується перехідний процес відпрацювання одиничного кроку двигуном.
У процесі пуску ротор може відставати від потоку статора на крок і більше; в результаті може бути розбіжність між числом кроків ротора і потоку статора. Основними характеристиками крокового двигуна є крок, гранична механічна характеристика і прийомистість. Гранична механічна характеристика — це залежність максимального синхронізуючого моменту від частоти керівних імпульсів. >
Гранична механічна характеристика крокового двигуна
Прийомистість — це найбільша частота керівних імпульсів, при якій не відбувається втрати або додавання кроку при їх відпрацюванні. Вона є основним показником перехідного режиму крокового двигуна. Прийомистість зростає зі збільшенням моменту синхронізації, а також зі зменшенням кроку, моменту інерції частин, що обертаються (або лінійно переміщуються) і статичного моменту опору

Гранична динамічна характеристика крокового двигуна
Прийомистість падає зі збільшенням навантаження.


