Головна » Рішення » Галузеві рішення » Автоматизація процесів » Автогоночний хронометраж
Система хронометражу, розроблена СВ АЛЬТЕРА, дозволяє забезпечити точність вимірювань автомобільних змагань як найпростішого, так і світового рівнів.
Мар'ян Петришин,Щодня інженери українських компаній-постачальників промислового обладнання та систем автоматизації стикаються з цікавими завданнями. Нещодавно одне з таких завдань стояло перед українською компанією СВ АЛЬТЕРА. Замовнику необхідно було розробити та впровадити систему хронометражу (вимірювання часу) для автомобільних змагань DragRacing.
Як відомо, DragRacing — це паралельні гонки двох автомобілів на відстані 1/4 милі, тобто 402,5 м. Час одного заїзду в більшості випадків триває від 7 с (спеціально допрацьовані надпотужні автомобілі) до 20 с (серійні автомобілі), а в середньому — від 10 до 15 с. Відповідно швидкість автомобіля на фініші коливається від 80 до 300 км/год. Під час гонок вимірюється час затримки на старті, час проходження відстані між стартом та фінішем, повний час проходження ділянки (із затримкою на старті) та швидкість автомобіля на фініші.
Створювана система хронометражу повинна забезпечувати такі функції:
І така система повинна була бути створена за порівняно короткий період за досить скромного бюджету.
Варіантів реалізації системи було кілька: від найпростішої системи з індикацією за місцем до високошвидкісної системи з великою кількістю можливостей та опцій. Але через невеликий бюджет і стислі терміни вибір був на користь щодо простої реалізації, яка б забезпечила необхідний мінімум функціональності. Отже, для реалізації системи було обрано початкову версію промислових контролерів VIPA 112-4BH02 (по 8 входів та виходів) та комплект із шести оптичних сенсорів (по три на кожну машину) Carlo Gavazzi PD40CNT40, PD40CNT40PP.
Для контролера з використанням WinPLC7 була написана проста програма вимірювання часу та керування світлофором, що забезпечила: час циклу контролера 1 мс; фіксацію часу спрацьовування кожного детектора; керування світлофором у режимі позиціонування, старту та заїзду; налаштування роботи світлофора за вибраним алгоритмом; фіксацію фальш-старту та фіксацію автомобіля, який фінішував першим; позиціонування положення автомобіля на фініші за стартовими сенсорами, а також передачу даних у комп'ютер для обробки та архівації.
Фотодатчики Carlo Gavazzi були обрані завдяки їх характеристикам , що ідеально підходить до умов завдання. Вони забезпечують час реакції 1 мс, ширину смуги руху 4-4,5 м, при цьому зона реакції становить 10 см. Вони надійно працюють в умовах прямого сонячного освітлення та мають низьке енергоспоживання, що дозволяє їх живити від невеликих акумуляторів.
Для комутації ліхтарів світлофора було використано реле Rm84 виробництва Relpol, яких виявилося цілком достатньо для комутації навантаження 1500 Вт/220 з частотою 0,5 с. Для з'єднання всього обладнання в єдину систему був застосований S-FTP-кабель з роз'ємами RJ45, що забезпечило максимально швидкий та простий монтаж, а також простий ремонт при можливих пошкодженнях.
Програмне забезпечення для комп'ютера було написане з використанням технології OPC (OLE for Process Control) та забезпечило візуалізацію на моніторі, друк та архівацію результатів заїздів. Сама система була випробувана на змаганнях DragRacing у Львові та забезпечила точність виміру до 0,003 с, чого цілком достатньо для цього рівня змагань.
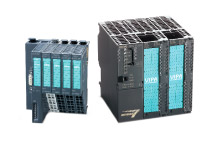
Описане вище завдання було реалізовано відносно простими засобами. Однак для чемпіонатів світового рівня, де необхідно гарантувати точність вимірювання часу 0,0005 с, більшу точність позиціонування та додаткову функціональність, можливостей такої системи недостатньо. Для таких змагань необхідно використовувати найсучасніші технології, наприклад, контролер Vipa (рис. 2) з технологіями Speed7 та Speedbus у комплекті з лазерними датчиками Leuze (частота перемикання більше 2500 Гц).
Така система гарантує точність фіксації часу 0,0005 с і здатна виконувати всілякі математичні розрахунки, вона забезпечує більш складні та різноманітні алгоритми керування стартовим світлофором та дозволяє встановити ширину смуги руху до 12 м, а ширину смуги фіксації — до 1-2 мм. З іншого боку, передача даних може здійснюватися в режимі реального часу через Ethernet відразу на кілька альтернативних робочих станцій суддів. Крім того, для забезпечення надійності системи та збереження всіх даних система дозволяє візуалізувати результати заїзду на панелі оператора (у разі збою комп'ютера) та вести архів усіх даних на карті флеш-пам'яті.
Контролери VIPA побудовані за модульним принципом. Це означає, що користувач має можливість оптимально підбирати склад модулів для вирішення свого завдання та гнучко модифікувати його при розширенні або зміні вимог до системи. Більшість модулів вводу/виводу та інтерфейсних модулів — універсальні, тобто їх можна застосовувати разом з будь-яким CPU відповідної серії. При цьому є можливість вибору процесорного модуля з оптимальною продуктивністю для вирішення конкретного завдання.