Головна » Рішення » Галузеві рішення » Автоматизація процесів » Застосування приводної техніки Lenze у намотувальних та друкарських машинах
Більшість стрічкових матеріалів зберігаються в котушках, потім розмотуються для обробки і знову намотуються назад на котушку в кінці процесу обробки. Між розмотувальним і намотувальним механізмами розташовані синхронізовані приводи, що забезпечують можливість обробки матеріалу, що перемотується.
Типові застосування електроприводів намотування включають:
Матеріал перемотується з постійною круговою (лінійною) швидкістю, яка встановлюється за допомогою розмотувальних механізмів відповідно до напрямку обертання. При цьому зусилля розтягування, що діє на матеріал, підтримується постійним або змінюється відповідно до діаметра. За керування зусиллям натягу відповідає електропривод намотувального механізму. Для контролю натягу матеріалу, що перемотується, часто використовується спеціальний датчик (танцюючий потенціометр).
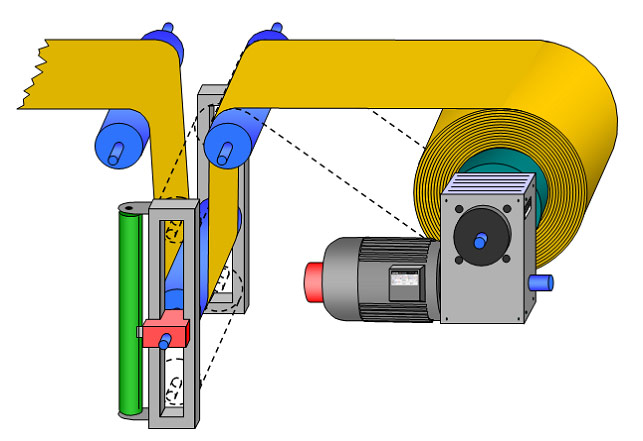
У разі застосування датчика натягу забезпечується широкий діапазон регулювання швидкості перемотування та висока точність стабілізації натягу. Такий підхід використовується для перемотування паперу, плівки та інших матеріалів, де коливання натягу можуть призвести до обриву стрічки та простою обладнання. Недоліком такого підходу є ускладнення механічної частини системи (встановлення потенціометра) і труднощі в налаштуванні системи натягу. Сам перетворювач переводиться в режим керування швидкістю з корекцією завдання по положенню танцюючого потенціометра, при цьому не потрібна компенсація тертя намотуваного матеріалу або зміни моменту інерції навантаження.
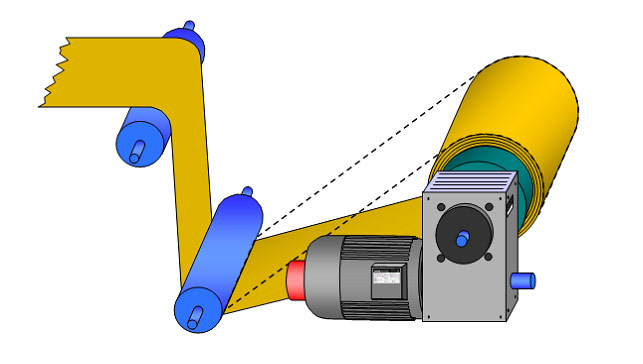
При іншому підході перетворювач частоти перетворюється на режим контролю натягу. В цьому випадку не потрібно додаткових механічних пристроїв, зокрема потенціометра, що танцює. Перетворювач частоти працює в режимі регулювання швидкості з обмеженням моменту, при цьому співвідношення моментів інерції двигуна та навантаження не впливають на якість моменту.
Величина натягу визначається шляхом встановлення граничного моменту, тому потрібна додаткова компенсація тертя матеріалу для виключення ефекту «телескопа». Цей ефект полягає в тому, що при великих діаметрах намотування сила натягу повинна зменшуватися, починаючи з певного діаметра, обернено пропорційно діаметру рулону. Також повинна враховуватися і сила тертя у підшипниках мотора, редуктора, валків, яка пропорційна швидкості намотування. Без урахування сили тертя при потрібному моменті 2–5% від номінального двигун може просто не обертатися. Це призводить до збільшення часу намотування та падіння продуктивності системи в цілому.
Відмінним рішенням реалізації завдань перемотування паперу, як з потенціометром, що танцює, так і без нього, є застосування сервосистем електроприводу на базі серводвигунів і перетворювачів LENZE 9300 Vector і 9400 Servo. Такі сервосистеми широко використовуються в промисловості та відрізняються тим, що дозволяють вирішувати складні приводні завдання без додаткових логічних пристроїв та програмовних логічних контролерів. Ця властивість забезпечується за рахунок великої кількості функціональних блоків, а також широкого діапазону регулювання моменту електродвигуна (D=50). Водночас найчастіше ці системи недешеві та їх застосування економічно невиправдане.
В установках, спроектованих для перемотування матеріалів з високою щільністю та постійною швидкістю, наприклад, при намотуванні лінолеуму, високі вимоги до динамічної точності не пред'являються. У такому випадку для підтримки натягу матеріалу, що перемотується, достатньо використовувати загальнопромисловий асинхронний електродвигун з перетворювачем частоти, що працює в режимі прямого керування моментом (ESV, 8400 Vector Stateline). Це значно спрощує механічну частину системи (не потрібно встановлення датчиків технологічного параметра та швидкості обертання електродвигуна) і зводить до мінімуму складність налаштування приводу, оскільки система регулювання моменту електродвигуна є розімкнутою.
При використанні перетворювачів частоти серії ESV завдання по моменту задається за допомогою потенціометра, що підключається до аналогового входу. Відносним недоліком застосування ESV є те, що обмеження швидкості при реалізації моментного режиму здійснюється тільки з лицьової панелі перетворювача. Слід пам'ятати, що для реалізації моментного режиму керування необхідно провести автоматичну ідентифікацію параметрів двигуна. Без правильного вводу паспортних даних двигуна в перетворювач коректна робота в моментному режимі неможлива.
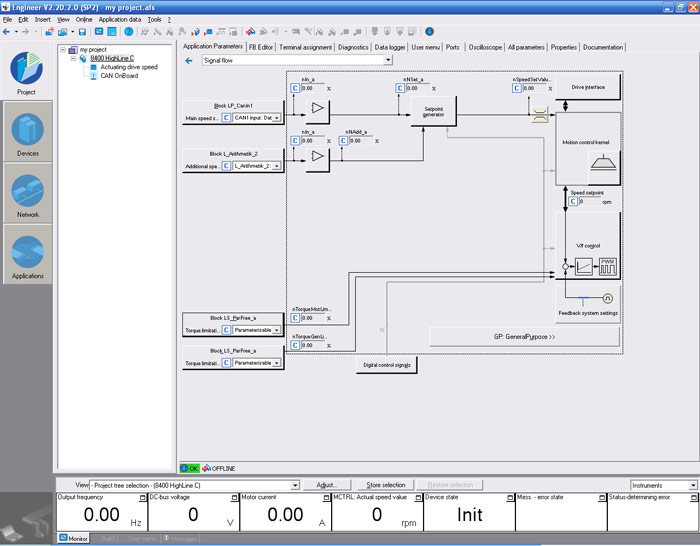
При використанні 8400 Vector Stateline можлива реалізація стабілізації натягу за допомогою танцюючого потенціометра. Можливість конфігурування каналу проходження сигналів дозволяє підсумовувати уставку за швидкістю і сигналу корекції положення датчика. Завдання за швидкістю обертання може передаватися по послідовному інтерфейсу (наприклад, CAN) з приводів, що синхронізують, або приводу розмотування, а сигнал корекції від датчика надходить на аналоговий вхід -10..+10 В.
Конфігурація сигналу завдання наочно представлена у вікні програмного забезпечення для конфігурування ПЧ L-force Engineer:
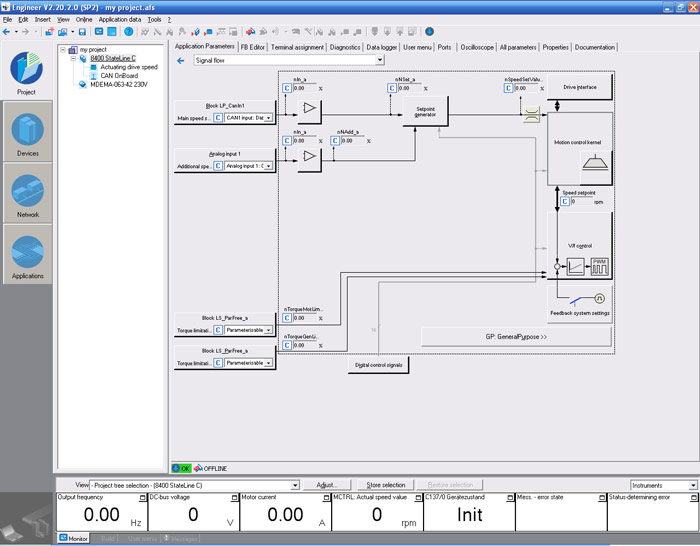
Саме конфігурування перетворювача вимагає зміни мінімальної кількості параметрів:
| № параметра | Опис | Значення | Примітка |
| С00007 | Режим керування | 30 | Керування CAN |
| С00190 | Формування уставки | 1 | Nout=Set+Add |
У разі застосування більш функціональних перетворювачів частоти 8400 Vector Highline і 8400 Vector Topline в режимі керування моментом можна реалізувати обмеження швидкості за допомогою другого потенціометра, що підключається до другого аналогового входу по напрузі. Також важливою перевагою використання 8400 Vector Highline та 8400 Vector Topline є можливість підключення асинхронних електродвигунів з датчиками зворотного зв'язку за швидкістю, при цьому якість намотування стає порівнянною з установками, в яких застосовуються сервосистеми електроприводу. У 8400 Vector Topline можливе підключення і синхронних двигунів із постійними магнітами з датчиками абсолютного положення ротора, що дозволяє реалізувати систему «електронний вал» для синхронізованих електроприводів установки за допомогою частотного завдання за швидкістю.
Також другий аналоговий вхід може бути використаний для корекції сигналу натягу в системі електроприводу з потенціометром, що танцює. При цьому, на перший аналоговий вхід подаватиметься сигнал корекції положення потенціометра. Вікно конфігурації сигналу має вигляд:
Значення додаткової уставки, тобто корекції сигналу основної уставки, визначається виходом блоку Arithmetics, що працює за формулою:
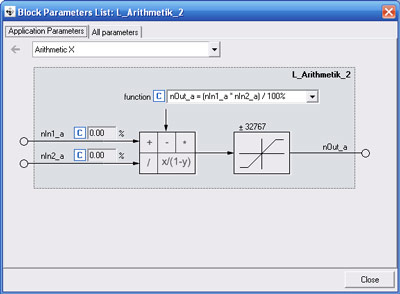 де nIn1_a, nIn2_a – входи, куди подаються сигнали з AIN1 і AIN2.
де nIn1_a, nIn2_a – входи, куди подаються сигнали з AIN1 і AIN2.
При необхідності корекції сигналу за швидкістю, залежно від діаметра барабана при неможливості встановлення датчика радіуса, може бути використаний функціональний блок обчислення L_CalcDiameter:

Важливо зазначити, що для коректної роботи цього блоку необхідне пряме вимірювання лінійної швидкості руху стрічки, а також кутової швидкості обертання намотувального барабана.
Загалом застосування перетворювачів частоти Lenze дозволяє знизити завантаження контролера керування процесом перемотування, підвищити якість перемотування та простоту експлуатації.