Головна » Корисна інформація » Глосарій
Регулятор — устройство, предназначенное для поддержания контролируемой величины на заданном уровне.
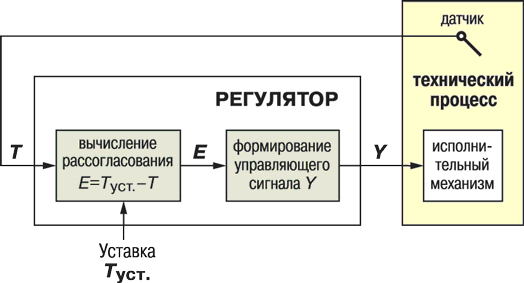
Схема работы регулятора аналогового типа
В режиме аналогового регулирования ЛУ рассчитывает отклонение E текущего значения контролируемой величины T от заданной уставки Tуст. (т. е. рассогласование). В результате на выходе регулятора вырабатывается аналоговый сигнал Y, который направлен на уменьшение рассогласования E. Этот сигнал подается на исполнительное устройство регулятора в виде тока или последовательности импульсов (ШИМ).
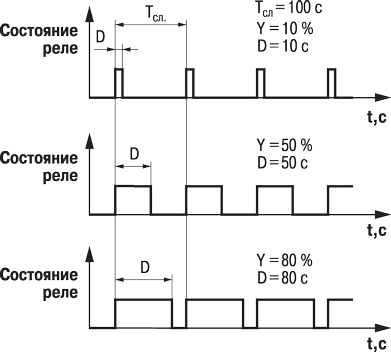
Если выходное устройство регулятора дискретного типа (реле, транзисторная или симисторная оптопара, выход для управления твердотельным реле), выходной сигнал преобразуется в последовательность управляющих импульсов с длительностью D (см. рисунок):

D – длительность импульса, с;
Тсл – период следования импульсов, с (задается пользователем при программировании);
Y – выходной сигнал регулятора.
Если в качестве выходного устройства используется ЦАП, выходной сигнал преобразуется в пропорциональный ему ток 4...20 мА или напряжение 0...10 В.
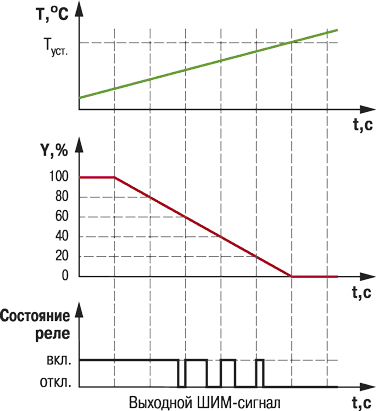
Принцип ШИМ для «нагревателя»
В выходных импульсах присутствуют все три составляющие ПИД - пропорциональная, дифференциальная, интегральная.
ПИД-регулятор (пропорционально-интегрально-дифференциальный) – наиболее эффективный и распространенный вид регулятора, обеспечивающий достаточно высокую точность при управлении различными процессами.